Do tej pory wektory definiowaliśmy jako uporządkowaną parę punktów. Gdy pracujemy na płaszczyźnie kartezjańskiej, wygodnie jest przedefiniować poznane dotąd pojęcia związane z wektorami, w szczególności definiując wektor jako uporządkowaną parę liczb.
Niech w układzie współrzędnych dane będą punkty A=(x_A,y_A) i B=(x_B,y_B). Wektorem \overrightarrow{AB} nazywamy uporządkowaną parę liczb [x_B-x_A,y_B-y_A], gdzie liczby x_B-x_A i y_B-y_A nazywamy współrzędnymi tego wektora.

Wektorem zerowym nazywamy wektor (w układzie współrzędnych oznaczamy jako punkt) którego obie współrzędne są równe 0, tj. \overrightarrow{0}=[0,0].
Współrzędne [p,q] wektora oznaczają o ile jednostek należy przesunąć punkt początkowy A względem odpowiednio osi OX oraz OY, aby wynikowy punkt był punktem B. Innymi słowy, o każdym wektorze możemy pomyśleć jak o sumie dwóch wektorów z których pierwszy jest równoległy do osi OX, a drugi - równoległy do osi OY. Oba wektory nazywamy wektorami składowymi danego wektora. Pierwsza współrzędna p informuje o tym o ile należy przesunąć punkt w poziomie, tj. w prawo (p>0) lub lewo (p<0). Druga mówi o ile należy przesunąć punkt w pionie, tj. w górę (q>0) lub w dół (q<0).

Mówimy, że dwa wektory \overrightarrow{u}=[u_x,u_y] i \overrightarrow{v}=[v_x, v_y] są równe, co zapisujemy \overrightarrow{u}=\overrightarrow{v}, jeżeli u_x=v_x oraz u_y=v_y.

Wektorem swobodnym nazywamy zbiór wszystkich wektorów równych danemu wektorowi (wektor nie ma określonego początku ani końca, a jedynie współrzędne).
Długością wektora \overrightarrow{u}=[u_x,u_y] nazywamy liczbę daną wzorem:
Długość wektora \overrightarrow{AB} gdzie A=(x_A,y_A) i B=(x_B,y_B) dana jest wzorem:

Wektorem jednostkowym (wersorem) nazywamy wektor o długości 1.
Dowolny wektor możemy zamienić na wektor jednostkowy dzieląc jego współrzędne przez długość.
Sumą wektorów \overrightarrow{u}=[u_x,u_y] i \overrightarrow{v}=[v_x,v_y] nazywamy wektor \overrightarrow{u}+\overrightarrow{v}=[u_x+v_x,u_y+v_y].
Wektory \overrightarrow{u}=[u_x,u_y] i \overrightarrow{v}=[v_x,v_y] nazywamy wektorami przeciwnymi, jeżeli ich suma jest wektorem zerowym, czyli zachodzi u_x+v_x=0 oraz u_y+v_y=0. Wektor przeciwny do wektora \overrightarrow{u} oznaczamy -\overrightarrow{u}.
Zauważ, że musi zachodzić: -\overrightarrow{u}=[-u_x, -u_y].
Różnicą wektorów \overrightarrow{u}=[u_x,u_y] i \overrightarrow{v}=[v_x,v_y] nazywamy wektor \overrightarrow{u}-\overrightarrow{v}=[u_x-v_x,u_y-v_y].
Iloczynem wektora \overrightarrow{u}=[u_x,u_y] przez liczbę k\in\mathbb{R} nazywamy wektor k \cdot \overrightarrow{u}=[k \cdot u_x,k \cdot u_y].
Mówimy, że wektory \overrightarrow{u} i \overrightarrow{v} są równoległe (mają ten sam kierunek), jeżeli istnieje k\in\mathbb{R} takie że \overrightarrow{u}=k \cdot \overrightarrow{v} . Jeżeli k>0 to mówimy, że wektory mają ten sam zwrot, a jeżeli k<0 to mówimy, że wektory te mają przeciwne zwroty. Dodatkowo, przyjmujemy że wektor zerowy \overrightarrow{0} jest równoległy do każdego wektora.
Niezerowe wektory \overrightarrow{u} i \overrightarrow{v} są równe wtedy i tylko wtedy, gdy mają tę samą długość, są równoległe oraz mają ten sam zwrot.
Niezerowe wektory \overrightarrow{u} i \overrightarrow{v} są przeciwne wtedy i tylko wtedy, gdy mają tę samą długość, są równoległe oraz mają przeciwne zwroty.
Dla dowolnych wektorów \overrightarrow{u},\overrightarrow{v},\overrightarrow{w} w układzie współrzędnych oraz dowolnych k,l\in\mathbb{R} zachodzą następujące własności działań na wektorach:
przemienność dodawania:
\overrightarrow{u}+\overrightarrow{v}=\overrightarrow{v}+\overrightarrow{u}(0)łączność dodawania
\overrightarrow{u}+(\overrightarrow{v}+\overrightarrow{w})=(\overrightarrow{u}+\overrightarrow{v})+\overrightarrow{w }(0)łączność mnożenia skalarnego
k \cdot (l \cdot \overrightarrow{u})=(k \cdot l) \cdot \overrightarrow{u}(0)rozdzielność mnożenia względem dodawania skalarów
(k+l) \cdot \overrightarrow{u}=k \cdot \overrightarrow{u}+l \cdot \overrightarrow{u}(0)rozdzielnością mnożenia skalarnego względem dodawania wektorów
k \cdot ( \overrightarrow{u}+ \overrightarrow{v})=k \cdot \overrightarrow{u}+k \cdot \overrightarrow{u}(0)
Przesunięcie równoległe (translacja) o wektor \overrightarrow{u}=[u_x,y_y] to przekształcenie geometryczne T_{\overrightarrow{u}} które każdemu punktowi A=\left(x,y\right) przyporządkowuje punkt A', dla którego \overrightarrow{AA'}=\overrightarrow{u}, tj.

W układzie współrzędnych obrazem punktu A=\left(x,y\right) w przesunięciu równoległym o wektor \overrightarrow{u}=[u_x,y_y] jest punkt A'=\left(x+u_x,y+u_y\right).
Przesunięcie o wektor nie zmienia ani rozmiaru, ani kształtu figury.
Jeżeli przesuwamy o wektor \overrightarrow{u}=[p,0] to mówimy o przesunięciu równoległym wzdłuż osi OX, a jeżeli \overrightarrow{u}=[0,q] to mówimy o przesunięciu równoległym wzdłuż osi OY.
Obrazem punktu A=(x,y) w powinowactwie prostokątnym o osi OX i skali k\neq 0 jest punkt A'=\left(x,k \cdot y\right).

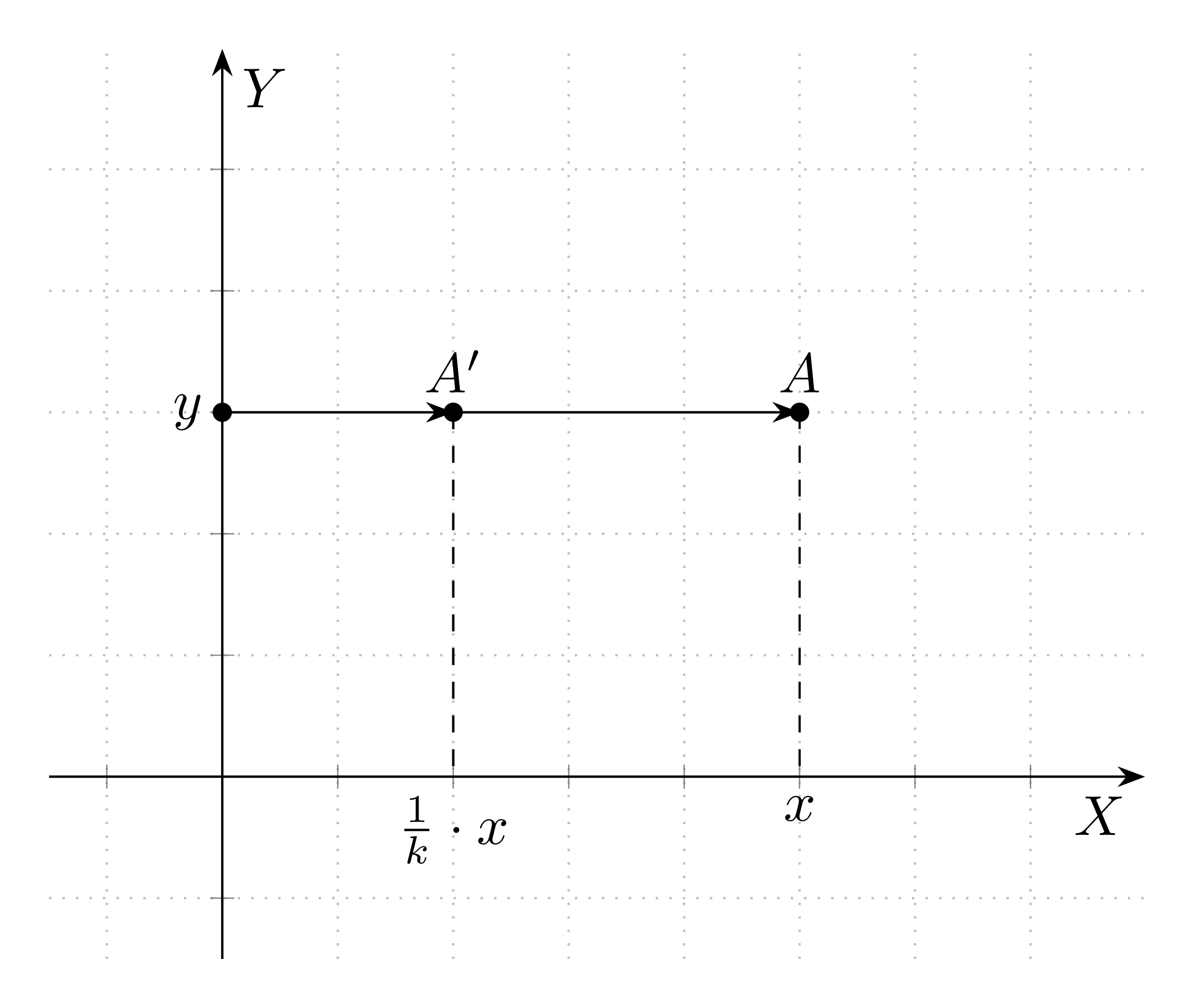
Obrazem punktu A=(x,y) w powinowactwie prostokątnym o osi OY i skali \displaystyle \frac{1}{k},k\neq 0 jest punkt \displaystyle A'=\left(\frac{1}{k} \cdot x,y\right).
Kątem utworzonym przez dwa niezerowe wektory \overrightarrow{u} i \overrightarrow{v} nazywamy kąt wypukły AOB, gdzie \overrightarrow{OA}=\overrightarrow{u} i \overrightarrow{OB}=\overrightarrow{v} . Oznaczenie: \measuredangle(\overrightarrow{u},\overrightarrow{v}).
Kąt \alpha utworzony przez dwa niezerowe wektory \overrightarrow{u}=\left[u_1,u_2\right] i \overrightarrow{v}=\left[v_1,v_2\right] spełnia zależności:
Mówimy, że wektory \overrightarrow{u} i \overrightarrow{v} są prostopadłe gdy kąt utworzony przez te wektory jest kątem prostym.
Dla wektorów \overrightarrow{u}=\left[u_1,u_2\right] i \overrightarrow{v}=\left[v_1,v_2\right] zachodzą następujące równoważności:
\displaystyle \overrightarrow{u}\perp \overrightarrow{v}\iff u_1v_1+u_2v_2=0
\displaystyle \overrightarrow{u}\parallel\overrightarrow{v}\iff u_1v_2-u_2v_1=0
Równanie prostej przechodzącej przez punkt P=\left(x_0,y_0\right) oraz prostopadłej do wektora \overrightarrow{u}=\left[p,q\right] dane jest wzorem: